
Notizie in… Controluce – dicembre 1995 – seconda parte
Progetto Giasone
Come riuscire a riprodurre, in una macchina, l’intelligenza dell’uomo
di Armando Guidoni
Nel numero precedente di Notizie in… CONTROLUCE abbiamo accennato ad un metodo di approccio alla progettazione finalizzata alla robotica, che appare molto promettente, in grado di rivoluzionare nel prossimo futuro il mondo della produzione industriale, della automazione e lo stesso modo di vivere dell’uomo.
Ebbene, il “Gruppo di Frascati”, con a capo Antonio Botticelli e Gianfranco Turchetti, ha chiamato questo progetto con il nome mitologico di Giasone e punta alla realizzazione dell’intelligenza “sintetica” applicata.
L’idea.
L’idea è banale. Dice Antonio Botticelli. Dall’osservazione e analisi dell’intelligenza animale, per ogni funzione elementare, si cerca di riprodurre, con schemi semplificati, tale intelligenza in modo artificiale. Integrando insieme tutte le funzioni elementari si sarà allora riprodotta, in una macchina, l’intelligenza dell’uomo.
Le singole funzioni intelligenti vengono analizzate e ricostruite in stretta collaborazione con le grandi industrie private. Mai nessuno sviluppo, dice Antonio, è stato fatto al di fuori di questo sostegno delle industrie private.
La memorizzazione.
Il modello di memorizzazione usato nei computer, prosegue Antonio, non è come quello usato dal nostro cervello. In effetti, non si può neanche dire che il nostro cervello “memorizzi”, così come è, ciò che la realtà esterna ci propone. Si può invece dire che ogni “pensiero” è una sorta di “progetto” al quale viene associato un codice di riconoscimento, una specie di “DNA dei pensieri”. Il pensiero, poi, viene dimenticato, ma il suo “progetto” risiede nel suo DNA ed è autorigenerativo. E’ come se noi avessimo gettato i disegni del progetto ma avessimo mantenuto uno strumento per rigenerarlo. Immaginiamo che il “pensiero” fosse stato il modello di una bottiglia che noi avevamo visto e toccato il giorno prima; se la realtà esterna ci dovesse riproporre un modello simile, noi saremmo in grado di riconoscerlo immediatamente, senza avere bisogno di fare alcuna analisi, perché noi “conosciamo il suo DNA”. Citando dal romanzo di Umberto Eco “il nome della rosa”: “se vediamo le impronte di un cavallo nella neve siamo capaci di proiettare l’idea del cavallo nella nostra mente senza aver bisogno di aver realmente visto l’animale che le ha lasciate”.
Neuroni e polarità nel “groviglio”.
Vediamo di spiegare meglio questo concetto. Da uno o più sensori umani (vista, tatto, udito, gusto, odore) si genera una “esplosione di energia” dalla quale deriva il trasferimento nel sistema nervoso di una quantità di energia chimica attraverso i neuroni. Questi mezzi di trasporto (neuroni) sono intrecciati fra loro ed anche con altri mezzi simili (dendridi) in un groviglio. Avviene che in certe zone della matassa si concentrano più quantità di energia rispetto ad altre zone generando “poli” di energia i quali producono polarità (differenze di potenziale). Per una legge naturale, tali polarità tendono ad azzerarsi (la materia, infatti, deve necessariamente avere campi elettrici macroscopici nulli); le quantità di energia, cioé, si sposteranno ancora, ridistribuendosi attraverso i percorsi più favorevoli.
Biunivocità fra “maglia di percorsi” ed “eventi”.
Si è così formata casualmente una maglia di percorsi che si trova in una relazione biunivoca con l’evento che l’ha creata. Immaginiamo che l’evento sia rappresentato da una palla che attraversa il campo visivo, ogni volta che la corrispondente maglia di percorsi si riattiverà significherà che in quel momento una palla sta attraversando il campo visivo; se l’evento fosse rappresentato da una fase di gioco con una palla, ogni volta che la corrispondente maglia di percorsi si riattiverà il soggetto sentirà il bisogno interno (mondo virtuale) di giocare con una palla; egli la cercherà all’esterno (mondo reale) e si sposterà per trovarne una fino a che il bisogno cessi.
Il meccanismo che è stato descritto per l’uomo ed i suoi neuroni, è stato riprodotto nel groviglio elettronico (Giasone) realizzato dal “Gruppo di Frascati”. E’ sufficiente che nel discorso vengano sostituite le parole “neuroni” con “circuiti elettronici” ed “energia chimica” con “energia elettrica”.
La “memoria dei tragitti” o “insegnamento”.
Questa “memoria dei tragitti” rappresenta un vero e proprio “insegnamento”. E’ come se un gruppo di persone si trovasse in un corridoio con numerose possibilità di uscita e ognuna di esse scegliesse il proprio percorso e lasciasse lungo il tragitto un “segno” del proprio passaggio; al passaggio successivo ognuno sarà in grado di riconoscere il proprio percorso e lo seguirà nuovamente, o ne sceglierà uno nuovo, senza alcuna possibilità di errore. La scelta dipenderà dal precedente potenziale di uscita di ognuno di essi:
-potenziale aumentato (derivata positiva): bisogna fare un altro percorso sulla base di una tendenza inversa alla precedente (obiettivo che si sta allontanando);
-potenziale diminuito (derivata negativa): bisogna fare un altro percorso sulla base della stessa tendenza (obiettivo che si sta avvicinando);
-potenziale invariato (derivata nulla): bisogna fare lo stesso percorso (obiettivo raggiunto).
La “destrezza”.
Quanto più è frequente la ripetizione dello stesso evento (obiettivo raggiunto), tanto più è probabile che ogni persona del gruppo riesca a fare lo stesso percorso; ciò rappresenta un vero e proprio “aumento della destrezza” del soggetto.
Qual’è il vantaggio? Quello di non aver bisogno di una “classificazione esatta” per il riconoscimento di un evento ma, avendo associato in un’unica classe eventi simili tra loro, la quantità di informazioni da immagazzinare per il “riconoscimento” è enormemente più piccola. Anzi, diciamo che la classificazione “esatta” sarebbe impossibile anche per l’uomo.
La modularità.
Come nell’uomo, anche in Giasone il “modulo intelligente” è uno solo; con adeguati “insegnamenti”, tali da far aumentare la “destrezza” del modulo centrale, e con il collegamento di adeguate protesi ai terminali, è possibile integrare nel sistema funzionalità diverse. Il sistema è modulare.
Funzionamento per “campi sterici” o “privazioni”.
Da quanto è stato detto, si può capire come questa intelligenza funzioni sulla base di “campi sterici” o “privazioni”.
Facciamo un esempio, dice Antonio. Immaginiamo di osservare un bambino che ha già associato nel suo groviglio il concetto che un poppatoio può placare il suo desiderio di mangiare. Immaginiamo che egli abbia fame e che abbia un poppatoio nel suo campo visivo; il bambino cercherà di raggiungerlo e di prenderlo per placare il suo isterismo; egli muoverà un braccio in una direzione a caso (non ha ancora imparato a governare gli arti); se il livello di isterismo aumenterà egli cambierà direzione; se il livello di isterismo diminuirà, invece, egli proseguirà fino a raggiungere il poppatoio e se, evento poco probabile, riuscirà a portare la tettina nella bocca senza farlo cadere in terra, avrà raggiunto l’obiettivo calmando, infine, la sua isteria.
La serie di movimenti necessari a raggiungere l’obiettivo ha una corrispondenza biunivoca con gli spostamenti di energia chimica nel groviglio cerebrale e tutto ciò rappresenta il modello di riferimento che verrà riutilizzato ogni volta che il bimbo riavvertirà lo stesso livello di isterismo, cioé lo stesso bisogno.
Riconoscimento degli oggetti e azioni.
La prima operazione che viene eseguita è il riconoscimento degli oggetti che si trovano nel campo visivo, poi interviene il tentativo di realizzare l’obiettivo prefissato eseguendo azioni basate sul concetto di “tropismi” o tendenze.
Facciamo un altro esempio. Associamo una forma “X” a una vite e una forma “Y” a un dado e diamo alle due forme la stessa complementarità che hanno vite e dado. Creiamo un modello biunivoco che possa ricostruire l’associazione astratta di coniugazione fra vite e dado dal punto di vista virtuale. Il modello sia contenuto in una struttura hardware. Sia definito che, se ci fossero due oggetti incoerenti fra loro, emergerebbe la tendenza a far diventare coerenti questi oggetti in una terza figura. A questo punto, se la macchina riconosce che all’esterno la vite e il dado sono separati e invece ha in sé l’idea che la vite debba essere messa dentro al dado, nascerà la tendenza, inizialmente casuale e poi via via più determinata (autodeterminazione) che è necessario rimetterli insieme. Laddove nasce la discrepanza fra il progetto e la realtà (vite e dado insieme, vite e dado separati) nascerà anche una polarizzazione fra le due figure proporzionale alla discrepanza. Se si “estraesse” questa polarizzazione e la si mandasse a un sistema che fosse in grado di eseguire un movimento ordinato (le braccia di un robot), questo sistema inizierebbe a muoversi in relazione alla quantità di discrepanza. Se in qualche modo, inoltre, facessimo entrare queste braccia nel sistema complessivo, esse stesse prenderebbero la tendenza a far riavvicinare il dado alla vite, rendendo il movimento ordinato.
Rivoluzioni nei metodi di produzione industriale.
Ciò rappresenta una rivoluzione sconvolgente per quanto riguarda il modo di programmazione delle macchine utensili tradizionali. I cicli di lavorazione non sono più rigidi; non sarà più possibile avere errori nella dimensione o nel posizionamento del pezzo; le traiettorie non sono più frutto di complicati e costosi algoritmi matematici; i controlli della qualità vengono effettuati automaticamente su tutti i pezzi e non a campione; ecc. ecc. Il costo complessivo delle nuove macchine, inoltre, risulta essere notevolmente inferiore a quello delle macchine tradizionali.
Come progetta il cervello umano?
L’intelligenza dell’uomo e il groviglio che ne riproduce la funzionalità in modo artificiale è stato chiamato Giasone e lo stesso nome è stato assegnato al progetto di cui stiamo discutendo, dice Antonio. Con più precisione, si può dire che “il pensiero dell’uomo viene governato da Giasone“. Quando un uomo si pone di fronte a un problema da risolvere, egli mette in campo e governa solo le contraddizioni e l’ambiente, poi si mette in attesa di una risposta alle sue domande, e tale risposta prima o poi arriverà. Ebbene, prosegue Antonio, quell’uomo ha solamente “assistito” al processo elaborativo che è scaturito dall’interrogazione, poiché è stato Giasone ad effettuarlo. Con la domanda che si è posto egli ha creato le contraddizioni (volontà, desiderio) e individuato gli elementi che fanno parte del progetto, Giasone ha fatto il resto! Giasone ha fatto tesoro delle esperienze passate, filtrando le cose inutili ed evidenziando gli elementi più importanti.
Questa macchina è riproducibile!
Esempio di una funzione di Giasone riprodotta in una macchina utensile.
Proviamo ad analizzare una operazione di fresatura. Un’azione di fresatura può essere ridotta idealmente in: un oggetto (pezzo) deve essere modificato sulla base di un modello finale (disegno di progetto). C’è materiale da rimuovere e materiale da mantenere. Il materiale deve essere rimosso con un utensile (fresa) montato su una macchina utensile (fresatrice). Una volta che Giasone avrà “l’idea” di tutto ciò, riuscirà a gestire autonomamente la fresa che dovrà asportare il materiale in eccesso e che non dovrà intaccare il profilo finale di progetto. Nascerà un tropismo (o tendenza) sulla base del quale, qualsiasi sia la fresa, qualsiasi sia la forma del pezzo, ecc., la fresa verrà attratta dal materiale da asportare. Questo è il programma che verrà dato a Giasone! E Giasone non seguirà nessuna traiettoria preindicata e nessun percorso predefinito; dovrà solamente fare le operazioni nel tempo più rapido possibile. I primi tentativi della macchina saranno scoordinati, le sue traiettorie saranno casuali (Giasone non ha ancora esperienza). A mano a mano che aumenterà il numero dei pezzi eseguiti, utilizzando la funzione dell’apprendimento, Giasone incrementerà la propria “destrezza” nella scelta dei percorsi più brevi, della migliore velocità di avanzamento e profondità di taglio. Il tempo di lavorazione per un pezzo sarà sempre minore fino a raggiungere il tempo ottimale. Tutto come farebbe un operaio provetto! Ed è banalissimo, molto più semplice che mettersi a definire le traiettorie di lavoro! Se io avessi avuto a disposizione un operaio specializzato e una macchina utensile mi sarei comportato nello stesso identico modo. Ciò sta a significare che Giasone è una macchina intelligente.
Macchina VNC (Virtual Numeric Control) della società Giuliani
Questa non è fantasia! E’ stata già realizzata una applicazione industriale. Il modulo della fresatrice della macchina della Giuliani che costruisce le chiavi (azienda che produce il 95% delle macchine che fanno le chiavi degli autoveicoli di tutto il mondo) funzionerà con la filosofia di Giasone. Uno dei moduli più interessanti di questa macchina è quello del “riconoscimento delle chiavi”. Il modulo riconosce una chiave fra 2, 1000 o 10000 diverse in un tempo di 16 millesimi di secondo. Ciò è possibile riproducendo una funzione intelligente del cervello. Se mi cade in terra un oggetto, dice Antonio, e sul pavimento si trovano altri 100 oggetti diversi, non dovrò esaminare uno ad uno gli oggetti che si trovano in terra al fine di trovare una corrispondenza con l’oggetto che cerco, ma riuscirò ad individuarlo immediatamente. E’ come se lo stesso oggetto emettesse una “chiave di riconoscimento” (o DNA). Per spiegare meglio facciamo un esempio. Ho una chitarra con 100 corde diverse fra le quali ne devo individuare una particolare (mondo reale). Ho anche una seconda chitarra con le stesse 100 corde fra le quali conosco la corda oggetto della ricerca (mondo virtuale). Pizzicando questa corda, essa entrerà in vibrazione e, per risonanza, vibrerà anche la corrispondente sul secondo strumento (mondo reale) consentendomi di individuarla immediatamente. Questo è lo stesso metodo di riconoscimento di oggetti usato da Giasone.
I metodi convenzionali automatici analizzano gli oggetti uno ad uno e li confrontano con il modello di riferimento; alla prima differenza riscontrata, l’oggetto viene scartato e si passa al successivo. Con oggetti diversi fra loro la ricerca è faticosissima; con oggetti omogenei (chiavi) la ricerca è ben più pesante. Il “Gruppo di Frascati” sta, inoltre, realizzando un modulo che riprodurrà un’altra funzione elementare intelligente della visione umana: riconoscere oggetti che si trovano anche a distanze diverse e non prefissate.
Biunivocità uomo-macchina.
Abbiamo già detto che questa “intelligenza artificiale” funziona sulla base di “campi sterici” o “privazioni”, cioè nello stesso modo in cui funziona la mente umana, usando i propri circuiti elettrici e non quelli biologici.
E’ possibile abbinare le due cose? Ovvero, come nel caso della scheda Visio per i ciechi, è possibile prendere i desideri o “isterismi” di un uomo e metterli dentro la macchina al fine di poterla “guidare”? In questo modo si potrebbe assegnare ad un uomo un terzo braccio o un terzo occhio e così via dicendo!
Applicazione sui tetraplegici.
A questa domanda Antonio ha risposto positivamente, dando, inoltre, particolare enfasi a questa possibilità e affermando quanto segue.
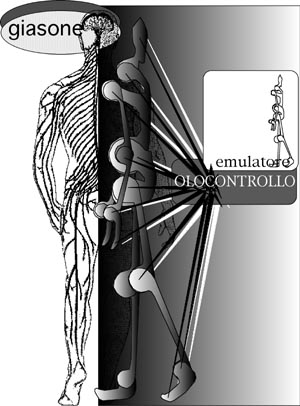
Si sta pensando, ha concluso Antonio, di “creare” un sistema muscolare artificiale sovrapposto idealmente ad un tetraplegico (totalmente inabile) e usato dal soggetto attraverso le stesse vie di desiderio che egli usava per muovere i muscoli quando era ancora abile. Il modo è, ad esempio, leggere direttamente i livelli di segnale di una macchina collegata al cervello (tipo encefalogramma) che rappresentano i livelli di isterismo. Il “sistema muscolare” comanderà una serie di movimentazioni opportune. Con un adeguato periodo di apprendimento il soggetto acquisirà le destrezze necessarie per comandare il “sistema muscolare” in modo coordinato, similmente a come fa un bambino.
Immaginate il quadro finale: un tetraplegico è seduto su una carrozzella motorizzata e dotata di un paio di protesi prensili; il tetraplegico indossa un casco e guida il sistema nel suo complesso con il solo pensiero!
Armando Guidoni
|
Copyright © 2015 Controluce - link a Notizie in... Controluce - link al sito dell'ENEA |
|
|
