
Notizie in… Controluce – agosto 1996 – quinta parte
Progetto Giasone
Come riuscire a riprodurre, in una macchina, l’intelligenza dell’uomo
di Armando Guidoni
Anche questo mese proseguiamo con l’analisi della teoria usata dal “gruppo di frascati” (ENEA-Oberon) per la realizzazione di macchine con “intelligenza sintetica applicata“. Questo progetto si chiama Giasone e ne abbiamo più volte parlato con Antonio Botticelli. Ricordiamo ciò che disse Antonio nel corso del primo colloquio: L’idea generale é molto banale! Dall’osservazione e analisi dell’intelligenza animale si cerca di riprodurre in modo artificiale ogni funzione elementare. Integrando insieme tutte le funzioni elementari si sarà allora riprodotta, in una macchina, l’intelligenza dell’uomo.
Nella quarta parte riportammo una figura dove veniva rappresentato il “groviglio” nel suo complesso e le cinque strutture elettroniche che concorrono, ognuna per la sua funzione, a definirlo: la struttura sensoriale, quella attuativa, le due strutture specializzate che detengono la memoria (una orientata alla parte sensoriale, l’altra a quella attuativa) e, infine, la struttura che riceve informazioni da tutte le altre e che è in grado di influenzare tutto il sistema (la coscienza). Quest’ultima struttura è stata chiamata Narciso e proprio di “lui” parleremo in questa quinta parte.
Visione schematica di Narciso
La macchina semplice.
La macchina Giasone che abbiamo descritto finora è una macchina semplice, priva della “coscienza di sé”. Giasone osserva un oggetto e, nel caso lo scenario fosse diverso dal modello di riferimento, egli lo sposterebbe in una nuova posizione; nel caso, invece, che lo scenario fosse coincidente con un altro presente nella sua memoria egli ripeterebbe le azioni a suo tempo svolte. Ma Giasone non sa se lo spostamento generato sia “giusto o sbagliato”, cioè egli non sa se la direzione intrapresa sia quella giusta o se la quantità di spostamento sia sufficiente o eccessiva, ecc.. E’ come se questo sistema di Giasone operasse in un universo privo di pianificazione e basato sulla casualità.
Analisi dell'”effetto coscienza” nel comportamento animale.
Ipotizziamo un semplice test. Immaginiamo di avere una palla messa su un tavolo. Noi siamo seduti con le braccia poggiate sul tavolo e afferriamo la palla con una mano. Immaginiamo di lanciarla da una mano all’altra facendola scorrere sul piano del tavolo; l’operazione deve essere effettuata con potenza di volta in volta crescente. Iniziamo il primo lancio e “ci facciamo un’idea” della potenza impiegata basandoci sia sul tempo di percorrenza che sulla pressione esercitata dalla palla sulla mano che la raccoglie. Al lancio successivo dovremo fare in modo che il tempo di percorrenza e la pressione siano leggermente superiori ai valori precedenti, e così via fino a che non riusciremo più a sopportare il colpo o fino a che non riusciremo più a controllare la direzione del lancio e la seconda mano non raccoglierà la palla. Bene, in questo test abbiamo fatto uso della nostra capacità di “avere coscienza” delle nostre azioni. Abbiamo, cioè, valutato in ogni momento “l’eco di ritorno” degli effetti causati dai nostri lanci. La dinamica delle nostre azioni è stata regolata proprio da questa “coscienza”.
Come “l’effetto Narciso” genera “la coscienza di Giasone”.
In Giasone tutto ciò viene riprodotto, a livelli molto elementari, da Narciso. Come abbiamo già detto nel numero precedente di “Notizie in… Controluce”, la struttura di Narciso riceve per induzione tutto il “rumore elettronico” provocato dalle oscillazioni dei segnali fra le coppie di ciuffi terminali delle quattro strutture primarie (attuativa, sensoriale, memorie). Anche questo rumore indotto inizierà ad oscillare tra i due ciuffi di Narciso (i ciuffi si comportano come se fossero due specchi) fornendo alle altre quattro strutture una eco continua e in tempo reale dei fenomeni avvertiti, provocati o memorizzati. Questa eco è una sorta di trasduzione degli eventi, ed il suo ritorno viene usato per creare una sovrapposizione di ciò che è già avvenuto con ciò che, un attimo dopo, sta avvenendo. L’influenza profonda dell’eco sul “rumore elettronico” delle strutture causerà una modificazione della dinamica. Ciò rappresenta un vero e proprio sintomo, interno a Giasone, tipo “stai sbagliando” oppure “stai andando bene” o, ancora, “stai andando a meraviglia”. Questa è “la coscienza di Giasone”.
Creazione di situazioni nuove ed adattamento.
Ora che abbiamo dato una coscienza a Giasone (Narciso), andiamo ad analizzare come questa nuova macchina risponderà alle nostre richieste.
Passiamo alla macchina il modello di un cerchio e chiediamole di riprodurlo. Immaginiamo che Giasone non abbia mai riprodotto nulla di simile. Il prodotto finale non sarà perfettamente rispondente al modello, ma sarà, ad esempio, simile ad un quadrato. Ebbene, Narciso farà accettare a Giasone quello che, in effetti, è un suo limite. L’obiettivo finale (il cerchio) viene modificato con un “rientro fantasma”, ovverossia con una figura che non esiste nel suo mondo ma che viene lo stesso riprodotta sulla carta; ciò provoca l’apparizione di questa nuova figura nel suo mondo reale e, quindi, il suo ingresso nella memoria. Alla fine, Giasone “possiederà” tutta una famiglia di figure. Questo, che sembrerebbe un difetto, rappresenta, invece, la sua “coscienza dell’errore”. La modificazione dell’obiettivo finale rappresenta, d’altro canto, la capacità di Narciso di saper fare adattare Giasone a tutte le situazioni impreviste. Si pensi al famoso esempio de “la volpe e l’uva” e a tutte le volte che noi abbiamo saputo trovare una giustificazione plausibile ad un nostro insuccesso. Narciso conferisce, quindi, una attitudine opportunistica alla differenziazione degli obiettivi ed alla creazione di nuovi.
Applicazione reale, in un progetto, dei concetti di Narciso.
Il “gruppo di frascati” ha iniziato una collaborazione con il mondo della chirurgia per introdurre le tecnologie “autonomatiche” a supporto delle azioni di endochirurgia per l’asportazione delle formazioni biologiche anomale (quali i tumori) dalle strutture fisiologiche sane.
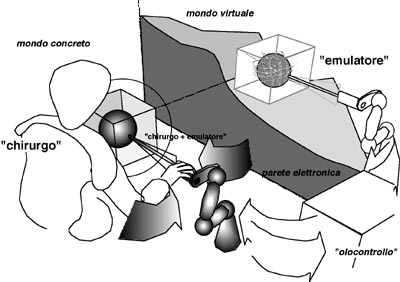
Visione schematica della macchina per la “chirurgia assistita” in autonomatica.
Si tratta, in particolare, di fornire un supporto all’endochirurgo quando deve asportare tumori dall’interno di strutture fisiologiche chiuse e quindi escluse dalla vista diretta.
Il progetto prevede una macchina guidata dal chirurgo (il quale rappresenta l’elemento creatore dell’azione) e controllata da Giasone.
Il mondo reale è costituito dal paziente, dal chirurgo e da un manipolatore che guida all’interno dell’organo una endocannula e gli strumenti chirurgici ad essa connessi.
Il mondo virtuale è costituito da un emulatore collegato al mondo reale attraverso il sistema di “olocontrollo” di Giasone.
Una macchina a risonanza magnetica esegue in tempo reale i rilievi delle sezioni interne del paziente in corrispondenza dell’organo invasato dal tumore.
Questi rilievi vengono passati all’emulatore che li trasforma; i volumi interni assumono così forma e consistenza in immagini tridimensionali comprensive degli strumenti usati.
Il chirurgo opera all’interno dell’organo osservando le immagini virtuali dell’emulatore ed usando il manipolatore al quale giungono anche le “impressioni”, registrate dai sensori presenti sull’endocannula, in merito alla consistenza della materia che la circonda.
Il manipolatore passa tutti i suoi parametri reali al mondo virtuale attraverso l’olocontrollo di Giasone.
Controllore e controllato.
Da una parte la realtà, costituita dall’oggetto su cui operare, dall’utensile e dal manipolatore che lo guida; dall’altra, l’esatto riflesso virtuale completamente ricostituito in modelli parametrici e volumetrici. Attraverso quella divisione ideale (che in figura viene rappresentata come “parete elettronica”) ogni componente reale “pilota” il suo corrispondente virtuale a compiere la stessa azione, quindi ad emulare la realtà. Viceversa, io posso vedere azioni effettuate nella realtà ma guidate dal mondo virtuale. E’ come se noi avessimo due entità distinte capaci ambedue di eseguire l’intervento chirurgico autonomamente. Potremmo, però, decidere di fare intervenire Giasone lasciando al chirurgo una funzione di “controllo”, oppure invertire le parti. In quest’ultimo caso avremmo eseguito una operazione di “chirurgia assistita in autonomatica”, con un “cieco” (il chirurgo) che opera sulla base di ciò che Giasone vede e restituisce sotto forma di immagini tridimensionali, e che è continuamente controllato. Egli non potrà mai “sforare” i parametri impostati (pressione degli strumenti sui tessuti, velocità di spostamento e volume di operatività).
La “sensazione dell’errore”.
Nella struttura generale, composta dall’intelligenza del chirurgo e da quella di Giasone, se uno dei due sta compiendo un errore, la struttura restituisce indietro la “sensazione dell’errore”, ma non la “correzione dell’errore”. Sarà il chirurgo che progetterà una nuova azione sulla base della sensazione di errore ricevuta. Questo si può definire un vero e proprio “effetto coscienza”, una specie di “freno” che il chirurgo avverte sul manipolatore; a questo punto il chirurgo aumenterà il livello di attenzione, e anche quello di analisi, per cercare di individuare il tipo di errore ed applicare le modificazioni più opportune. Abbiamo detto “aumenterà il livello di attenzione”; ciò vuol dire che in condizioni normali questo livello, nel corso dell’operazione assistita, può anche essere abbassato, consentendo pertanto l’esecuzione di interventi particolarmente lunghi e delicati senza il pericolo della comparsa dei noti “stati di allucinazione” dovuti allo stress troppo intenso.
Armando Guidoni
|
Copyright © 2015 Controluce - link a Notizie in... Controluce - link al sito dell'ENEA |
|
|
