
Notizie in… Controluce – ottobre 1995 – prima parte
Un Robot “intelligente” aiuta l’uomo
Dall’ENEA di Frascati un dispositivo che può restituire ai ciechi la loro autonomia
di Armando Guidoni
Nei mesi scorsi le pagine scientifiche dei quotidiani e dei periodici specializzati hanno riportato a grandi titoli la notizia della realizzazione, da parte del “Gruppo di Frascati”, del dispositivo “Visio” che consente a un non vedente di “percepire”, ovverossia di riconoscere gli oggetti che si trovano nel suo spazio di movimento. Il “Gruppo di Frascati” è costituito da ricercatori dell’ENEA e della Società Oberon. Tali scienziati lavorano insieme da anni sulla base di un accordo che prevede la condivisione delle eventuali ricadute tecnologiche ed economiche delle loro ricerche. I coordinatori sono Antonio Botticelli e Gianfranco Turchetti.

Gianfranco e Antonio come vengono visti attraverso la scheda Visio
L’architettura funzionale del dispositivo è simile a quella della visione umana dove, attraverso una lente (il cristallino), un sensore (la retina) e un particolare “sottoinsieme funzionale” (il sottoretina), il fronte di luce viene organizzato e inviato alle terminazioni del nervo ottico; nello stesso modo, attraverso una lente (l’obiettivo di una microtelecamera), un sensore (l’elettronica della telecamera), e un sottoretina (la scheda elettronica Visio), il fronte di luce viene organizzato e inviato alle terminazioni nervose della pelle.
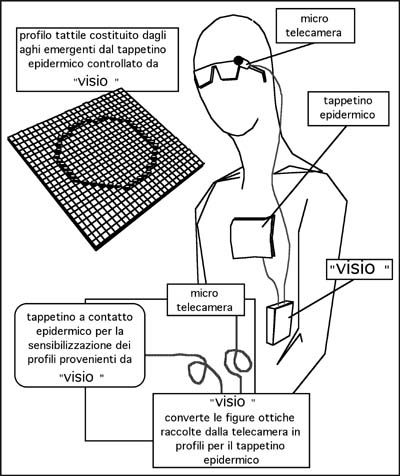
Schema del “Dispositivo di percezione per non vedenti”
Nella scheda Visio sono riprodotte anche alcune funzioni particolari del sottoretina umano che è costituito da strati di neuroni e ha la funzione di “smontare” qualitativamente ciò che arriva dal fronte di luce e di riorganizzarlo sulla base di specializzazioni. Ad esempio, l’uomo è molto sensibile alle informazioni contenute ai margini del campo visivo (segnali laterali) ed è come se il sottoretina attribuisse una risposta maggiore alle variazioni di segnale che provengono da quelle porzioni di retina. La scheda Visio, inoltre, attraverso un particolare processo di “semplificazione dell’immagine”, “individua ed estrae” i contorni degli oggetti contenuti nel fronte di luce.
Per queste ragioni, sia nel caso della visione umana che del sistema di visione artificiale, al cervello arrivano messaggi opportunamente riconiugati (immagini ricomposte).
La descrizione del dispositivo a questo punto è semplice: da una microtelecamera poggiata su una montatura di occhiali, le caratteristiche salienti dell’immagine a due dimensioni vengono trasferite a Visio che le “elabora” e poi le invia al cervello attraverso un tappetino di aghi vibranti che stimolano la pelle del cieco.
Questo dispositivo, nel suo complesso, verrà messo in commercio entro il 1996 ad un prezzo che oscillerà fra 4 e 6 milioni. Il giro di affari si preannuncia di enorme rilevanza. Si pensi alle aziende che cureranno la produzione, la distribuzione e i corsi necessari per l’utilizzo del dispositivo; si pensi al risparmio della società civile nelle spese di assistenza; si pensi, soprattutto, a ciò che rappresenta per i non vedenti il ripristino delle loro autonomie e il recupero delle loro attività produttive.
Ma la cosa più sensazionale è che “Visio” non è stata progettata per questo scopo, ma rappresenta il sottosistema di visione di un robot sviluppato per un utilizzo di tipo industriale e civile. “La struttura funzionale di questo componente, spiega Antonio, è analoga a quella animale; per cui, tagliando i fili che collegano il robot alla scheda e collegando questi fili all’uomo, egli riacquista la capacità di interagire con l’ambiente: la macchina percepisce nello stesso modo in cui percepisce l’uomo”. Questo componente rappresenta una sorta di supporto alla “intelligenza sintetica” del robot; è costituito da una matassa di circuiti elettronici che si attivano senza il governo di una serie di programmi applicativi. Non è pertanto necessario sviluppare software per il suo funzionamento. Stiamo parlando di robot della nuova generazione che operano sulla base di modelli emulati e possiedono la capacità di sviluppare in modo autonomo destrezze sempre più consistenti e di applicarle in tempo reale nel momento più opportuno; stiamo parlando di autonomatica. “L’uomo, dice Antonio, è dotato di una intelligenza che è divenuta superiore per potere ospitare una quantità enorme di modelli interagenti fra loro; la macchina può lavorare, nello stesso modo dell’uomo, su “alcuni” modelli, acquisendo la “destrezza” necessaria al loro immediato riconoscimento ed alla esecuzione di alcune operazioni che devono essere fra loro coerenti.”.
“E tutto questo, abbiamo chiesto, senza avere scritto una riga di software?”. “Si, il software non c’è, ci ha risposto Antonio, c’è solo quello necessario per le simulazioni e per la costruzione dei modelli sperimentali.”
Ci siamo fatti spiegare dagli ideatori la teoria che sta alla base di questa applicazione innovativa della robotica; dal colloquio è emerso che esiste un progetto sconvolgente che potrà rivoluzionare nel prossimo futuro non solo il mondo industriale e della automazione ma anche il modo di vivere dell’uomo.
Nei prossimi numeri di questo giornale verrà analizzata questa teoria in modo tematico e con un maggiore livello di approfondimento.
Armando Guidoni
|
Copyright © 2015 Controluce - link a Notizie in... Controluce - link al sito dell'ENEA |
|
|
